Difference between revisions of "Rotar5"
(→PCB) |
|||
| (One intermediate revision by the same user not shown) | |||
| Line 1: | Line 1: | ||
| − | Jde o menší úpravy [[Rotar47|Rotáru 4.7]] pro použití modulu | + | Jde o menší úpravy [[Rotar47|Rotáru 4.7]] pro použití modulu čidel [[Hh12]] a [[Accel]]. Změna je prakticky jen v použití původního synchronizačního impulzu pro napájení čidla. Pro komunikaci s PC se používá modul [[Usb2ttl|USB2TTL]]. |
=Schéma zapojení= | =Schéma zapojení= | ||
| Line 6: | Line 6: | ||
=PCB= | =PCB= | ||
| − | <gallery> | + | <gallery mode="packed" heights="320px"> |
Image:Rproc50a600.png|PCB strana součástek (600 DPI) | Image:Rproc50a600.png|PCB strana součástek (600 DPI) | ||
Image:Rproc50b600.png|PCB strana spojů (600 DPI) | Image:Rproc50b600.png|PCB strana spojů (600 DPI) | ||
Latest revision as of 22:01, 30 August 2015
Jde o menší úpravy Rotáru 4.7 pro použití modulu čidel Hh12 a Accel. Změna je prakticky jen v použití původního synchronizačního impulzu pro napájení čidla. Pro komunikaci s PC se používá modul USB2TTL.
Schéma zapojení

Schéma zapojení rotáru 5
PCB
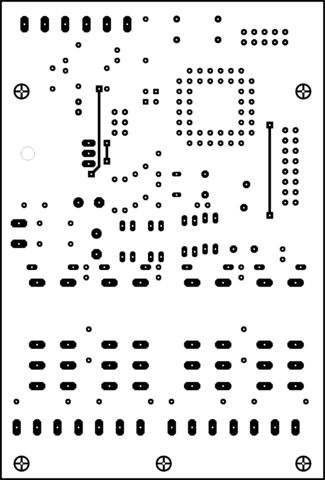
PCB strana součástek (600 DPI)
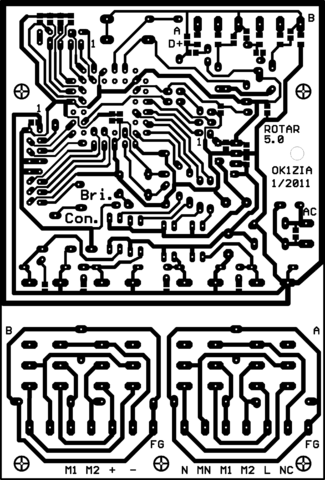
PCB strana spojů (600 DPI)
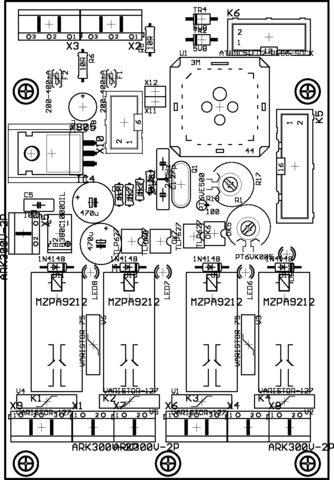
Osazovák klasická montáž
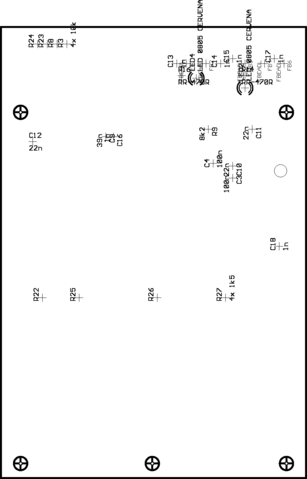
Osazovák SMD montáž




Poznámka: 600 DPI mají obrázky v plném rozlišení (Full resolution). Pozor, ať nestáhnete pouze náhledy